◈ PINS APP - PinS APP (Point-in-Space Approach)란?
PinS APP는 Point-in-Space Approach Procedure의 약자로, 헬리콥터 전용으로 설계된 이착륙 및 저고도 경로입니다.
따라서, 지상 기반 장비의 필요 없이 항공기에 탑재된 장비로 공항이 아닌 병원,
사설 부지 등 다양한 장소에 IFR 접근이 가능해집니다.
아직 국내에는 Pins 절차가 정립되어 있지 않지만 헬리콥터의 장점과 GNSS, SBAS의 기능들을 모아
IFR의 장점을 최대한 활용할 수 있는 절차입니다.
이 절차를 수행하기 위해서는 아래에도 언급하겠지만 다양한 시스템적, 교육훈련적,
비관제공역에서의 TRAFFIC AVOIDENCE 절차수립등 많은 과제가 남아 있는 게 사실이나
이륙과 접근이 기상제한으로 부터 용이해지고 훈련만 잘 되어있다면
안전을 더 확보할 수 있는 절차이기도 합니다.

◈ 주요 특징
1. 헬리콥터 전용 설계
- 헬리콥터를 위해 특별히 개발된 IFR 접근, 출발 및 저고도 경로
- 헬리콥터의 운용 특성을 고려한 절차
2. GNSS 기반 운용
- GNSS(위성항법시스템)를 기반으로 비행
- ABAS(Aircraft-Based Augmentation System) 기반 절차
- IFR 조건에서 다양한 사이트로의 이착륙 가능
3. 유연한 이착륙지 및 경로 구성 가능
- 기존 공항의 SID/STAR와 달리 짧고 효율적
- 출발과 접근 사이 공간상의 여러 지점을 연결하여 경로 생성
- 공항 외부 환경에서도 적용 가능
- 헬리콥터처럼 활주로에 의존하지 않고 임의 지점(예: 산간헬리포트, 선박구조지점 등)으로 접근·착륙해야 할 때 사용
- 지형·장애물로 인해 기존 활주로 기반 절차가 부적합하거나,
착륙지가 활주로 표준을 충족하지 못할 때의 안전한 접근수단 제공
4. 요구조건
- 주로 GNSS(RNAV) 기반으로 설계 : 일부는 ‘basic GNSS receiver’ 수준으로도 설계 가능하나 절차별/국가별 승인 필요.
- 운영자는 해당 접근을 수행할 수 있는 운영·절차 승인(opspec, 국가별 규정)을 갖춰야 하고,
조종사·항공기 훈련·장비 적합성 확인 필요.
5. 개발 배경 : 기존 고정익 항공기용 표준 계기 절차(SID/STAR)의 단점 보완
- 경로가 너무 길고 시간 소모적
- 장애물 회피 등의 이유로 공항 외 환경에서 개발이 제한됨
- 헬리콥터의 운용 특성에 부적합
6. 해당 절차의 장점
- 안전성 향상 : 악기상 조건에서 비행 시 전반적인 안전 수준 증대
- 접근성 개선 : 기상으로 인해 접근이 제한되던 현장에도 도착 가능
- 효율성 : 기존 절차보다 짧고 직접적인 경로
참고 : 국내에서는 아직 PinS 절차가 널리 개발되지 않은 상태이지만, 헬리콥터 운용의 안전성과 효율성 향상을 위해 점차 도입이 검토되고 있음
◈ 절차적 특징(단계별)
1. 계획(Planning)
- 차트에서 PinS 절차의 MAPt 좌표(위치), OCA/H(최소시계고도), 시계구간 관련 표기(Descent Point 등)를 확인
2. 진입(Initial/Intermediate)
- RNAV 장비에 IAF→IF→FAF→MAPt로 이어지는 절차 경로를 입력/확인하고,
수평·수직 경로 일치성(예: VNAV 사용 여부)을 점검
3. 최종접근(Final → MAPt)
- RNAV가 MAPt까지 안내. MAPt 도달 전에는 지정된 OCA/H(또는 MDH)을 지켜야 하며,
시계조건(시정·구름층 등)이 만족되어야 MAPt 기반 시계구간으로 전환 가능
4. MAPt 도달 후(Visual segment)
- MAPt에 도달하면 조종사가 시계비행으로 전환하여 착륙지점으로 비행(‘proceed visually’)하거나,
필요한 경우 다른 접근 결심. 이 시점부터는 착륙장은 시계 기준(예: 착시·장애물 인지 가능성 등)을 만족해야 함
5. 미수행(Go-around) 기준
- MAPt에서 시계요건 불충족 시 복행(돌아감) 또는 대체계획을 수행해야 하며, 이는 절차 차트와 운항규정에 명시
◈ 운영상 제한·주의점
1. 시계구간 요구: MAPt 이후의 최종 시계세그먼트 때문에 시정·구름기준이 엄격할 수 있음.
2. 항공기·장비 승인 필요: 일부 PinS는 ‘basic GNSS’만 요구하지만, 운영국가·운영자 요구에 따라 더 높은 성능·승인이 필요.
3. 차트 표기: PinS는 활주로 식별자 대신 지점 좌표와 ‘visual segment’ 표기가 포함되므로 차트 해석 숙달 필요.
◈ 조종사/운영 담당자 확인사항
1. 차트에서 MAPt 좌표·시계세그먼트·DP(Descent Point) 표기를 반복 확인
2. RNAV 수신상태·RAIM/ALERT 상태를 출발 전·접근 중 계속 모니터링(OBPMA CHECK)
3. MAPt 이후 시계전환 실패 시의 복행·대체절차를 사전에 명확히 계획
◈ 관련근거
1. ICAO PANS-OPS (Doc 8168) — PinS 절차 설계·운용 관련 권고와 정의.
2. Skybrary: Point-in-Space (PinS) helicopter operations — PinS의 절차적·운용적 해설(시각적 예 포함).
3. FAA RNAV (GPS) Approaches 안내 자료 — PinS 유형 및 RNAV 접근 일반 지침.
4. UK CAA CAP / 절차 문서 — 헬리콥터 PinS 설계·착륙장 관련 규정 예시(국가별 차 유의).
5. https://pilotswhoaskwhy.com/2025/01/12/what-are-helicopter-point-in-space-pins-procedures/
- FAA AIM / Helicopter operations (Proceed Visually 설명)
- FAA 문서: PinS visibility / policy 메모(Proceed VFR 관련 가이드)
- SKYbrary — Point-in-Space 개요
- UK CAA Guidance — proceed visually vs proceed VFR 비교 설명
- EUROCONTROL PinS Generic Safety Case
◈ 관련근거 5번(이해를 돕기 위해 재구성하였습니다.)



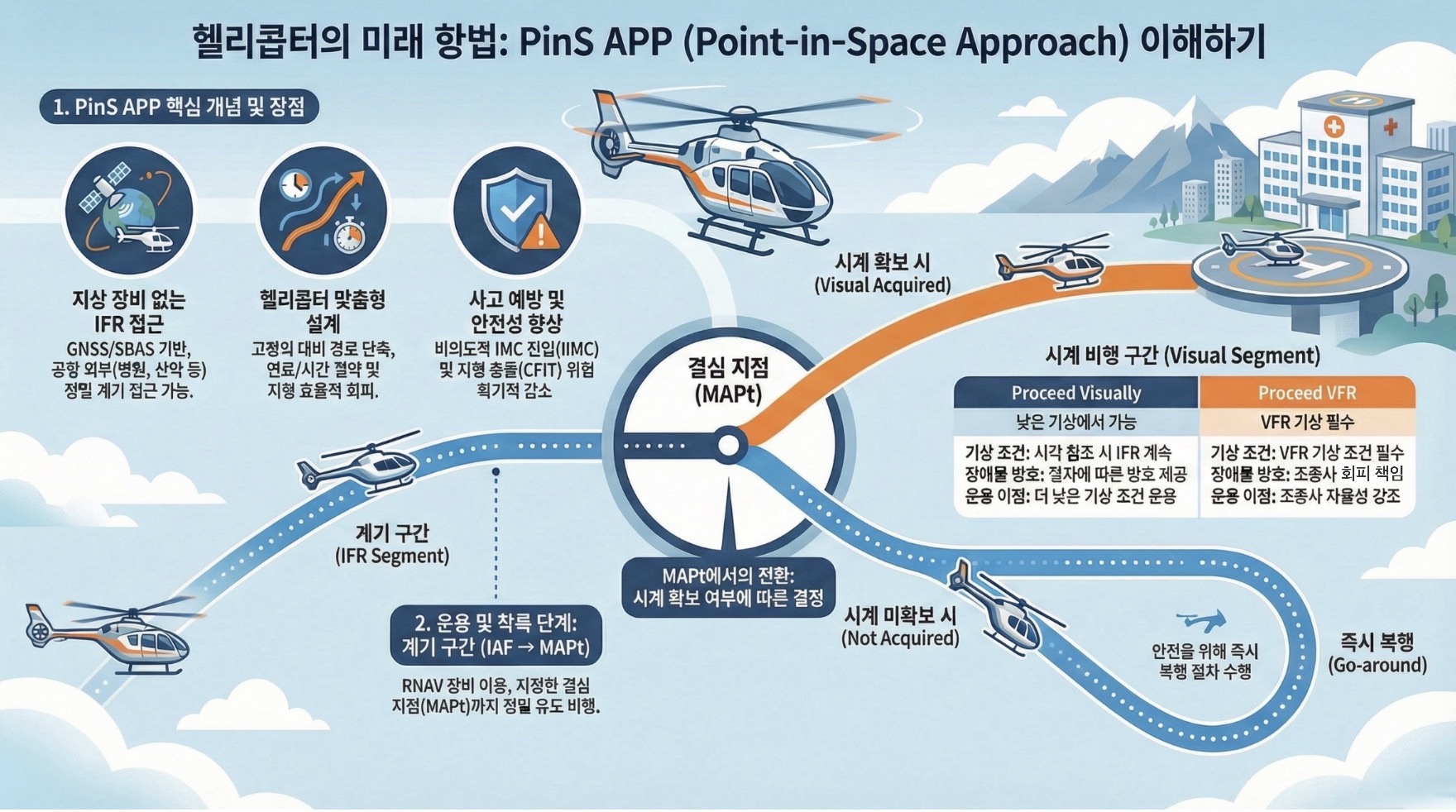
1. PinS 절차 작동 방식
- PinS 절차는 크게 시계 비행 구간(Visual Segment)과 계기 비행 구간(Instrument Segment)의 두 부분으로 나뉩니다.
* 출발 시 : 이륙 후 시계 비행으로 최초 출발 지점(IDF, Initial Departure Fix)까지 비행합니다.
IDF에서 최소 통과 고도(MCA)에 도달하면 IFR 계기 비행으로 전환하여 목적지로 향합니다.
* 접근 시 : 목적지 근처에서 최초 접근 지점(IAF, Initial Approach Fix)부터 PBN 기반의 계기 접근을
시작하여 결심 지점(MAPt, Missed Approach Point)에 도착합니다. 이 지점에서
착륙 여부를 결정하며, 이후 다시 시계 비행으로 전환하여 최종 착륙장까지 비행합니다.
2. PinS와 PBN(Performance Based Navigation)의 관계
- PinS 절차는 성능 기반 항법(PBN) 개념을 기반으로 구축되었습니다.
* PBN이란? 항공기가 지정된 공역, 계기 접근 절차 또는 항공로에서 요구되는 정확도, 무결성,
가용성 등을 포함한 특정 항법 성능 요건을 충족하도록 하는 항법 개념입니다.
* PinS 절차의 계기 구간은 RNP(Required Navigation Performance)와 같은
PBN의 항법 요건(예: RNP 1 또는 RNP 0.3)을 기반으로 설계됩니다.
* PBN을 활용하여 PinS는 지상 시설 없이 정밀한 헬리콥터 맞춤형 IFR 경로를 제공할 수 있습니다.
* 시계 비행 구간: 'Proceed Visually' vs 'Proceed VFR'
- 절차의 시작과 끝에 있는 '시계 비행 구간'은 두 가지 방식으로 운영될 수 있으며,
이 차이가 최소 기상 조건에 중요한 영향을 미칩니다.
※ 요약하자면, PinS Proceed Visually는 VMC가 충족되지 않아도 (예: ILS 접근의 최저점처럼)
시각적 참조가 있다면 장애물 방호 하에 IFR로 계속 진행할 수 있어 더 낮은 기상 조건에서 운영이 가능합니다.
반면 PinS Proceed VFR은 해당 구간에서 VFR 기상 조건이 필수이며 장애물 방호는 조종사에게 달려 있습니다.
3. PinS 절차의 주요 목적 (The Point of PinS)
PinS 절차의 궁극적인 목적은 헬리콥터 비행 안전을 혁신적으로 개선하는 것입니다.
- 긍정적인 안전 효과
* 접근성 개선: 악천후로 접근이 불가능했던 병원이나 외딴 지역에 IFR 접근이 가능해져
운영 영역이 넓어지고 미션 성공률이 높아집니다.
* 효율성 증대: 기존 고정익 항공기 중심의 길고 비효율적인 IFR 절차 대신,
헬리콥터에 맞춤화된 경로를 제공하여 시간과 연료를 절약합니다.
* 사고 감소:
** Inadvertent Entry into IMC(비의도적 계기 기상 조건 진입): 전 세계적으로 주요 헬리콥터 사고 원인 중 하나인데,
PinS로 IFR 활용이 '정상화'되면 IFR 전환이 더 쉬워져 이로 인한 사고 위험이 줄어듭니다.
** CFIT(Controlled Flight Into Terrain, 지형 충돌): 장애물 방호가 적용된 고정밀 접근 절차를 통해 CFIT 위험을 낮춥니다.
* 인프라 비용 절감: 지상 기반 항행 시설이 필요 없으므로 구현 비용이 저렴합니다.
- 잠재적인 위협 요소
모든 변화와 마찬가지로 PinS 도입에도 해결해야 할 과제가 있습니다.
* 문화적 변화와 역량: 헬리콥터 산업 내에서 VFR 중심의 사고방식을 버리고 IFR 숙련도와 능력을 높여야 합니다.
* 숙련도 및 훈련: 헬리콥터 조종사들의 IFR 자격 유지 및 역량이 PinS의 신뢰성을 결정합니다.
* 기술적 오류: 기술적 오작동 시 장애물 분리(Obstacle Separation)를 상실할 수 있습니다.
* 기상 정보 부족: 운영 지역의 정확한 기상 정보가 없다면 PinS 운영을 위한 결심이 불가능합니다.
* 공역 문제: PinS가 비관제 공역에서도 비행할 수 있다는 점은 다른 교통과의 충돌 위험을 완화하기 위한
추가적인 조치가 필요함을 의미합니다.
◈ 헬리콥터 PinS 절차는 계기 비행 환경에서 헬리콥터의 안전성과 운영 효율성을 크게 향상할 수 있는 절차입니다.
◈ 공식적인 도입을 위해서는 기술 개발뿐만 아니라 조종사의 IFR 숙련도 향상과 문화적 변화가 필수적입니다.
◈ V-NAV를 활용한 패드 접근 실사용 (예)






'헬리콥터 이론' 카테고리의 다른 글
| 016 - 고도2 - 고도의 종류 및 개념 (0) | 2025.11.03 |
|---|---|
| 015 - SAR MODE2(UPPER MODE를 활용한 MOT) (0) | 2025.11.02 |
| 013 - 헬리콥터 활주착륙 간 Shimmy(시미) 현상 (0) | 2025.10.28 |
| 012 - SAR MODE(Search and Rescue Mode) (0) | 2025.10.28 |
| 011 - 고도1 - DA(DH) VS OCA(OCH) (0) | 2025.10.27 |