029에서는 헬리콥터 조종의 기본인 세 가지 조종간(사이클릭, 콜렉티브, 페달)의 역할을 살펴보았습니다.
그렇다면 조종사의 손과 발에서 시작된 이 각각의 움직임들은 어떻게 하나의 로터 시스템으로 전달되어 복잡한 기동을 만들어내는 것일까?
단순히 선을 연결하는 수준을 넘어, 서로 다른 성격의 신호를 하나로 합치고 이를 회전체에 전달하는 '기계식 연결의 방식'을 설명하겠습니다.
1. 지능형 분배 장치: 믹싱 유닛(Mixing Unit)
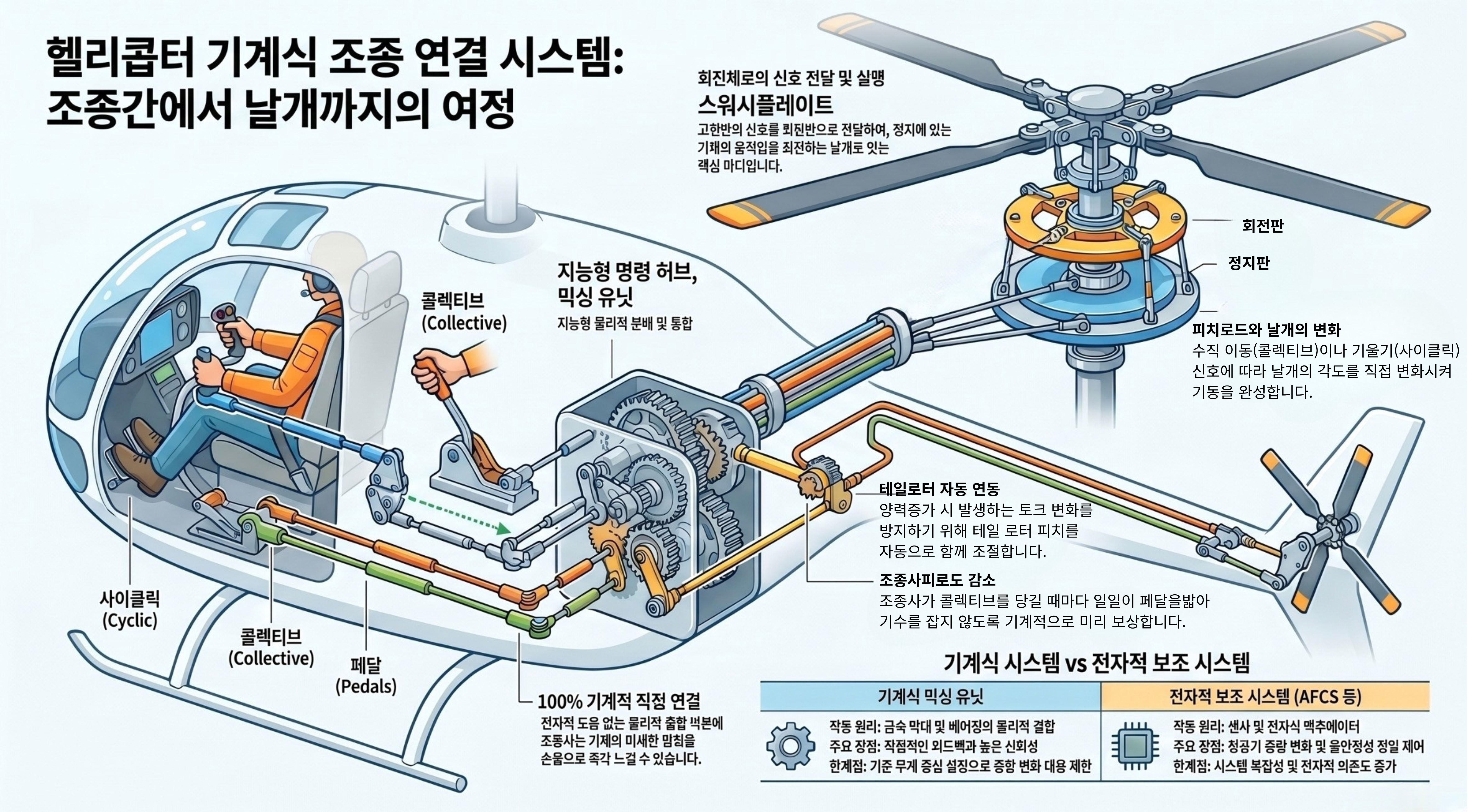
조종사가 상승(콜렉티브)을 시도하면 메인 로터의 양력이 커지지만, 동시에 엔진의 회전 반작용(토크)도 강해져 기수가 돌아가려 합니다. UH-60이나 KUH-1 같은 기종은 이런 '부수적인 현상'을 조종사가 일일이 발로 잡지 않도록 믹싱 유닛에서 미리 해결합니다.
* 복합 명령의 통합: 사이클릭의 차등 입력과 콜렉티브의 일괄 입력을 합쳐주는 것은 기본입니다.
* 테일 로터 연동(Tail Rotor Mixing): 콜렉티브 레버를 당기면 믹싱 유닛은 메인 로터의 피치를 올림과 동시에, 테일 로터의 피치도 자동으로 함께 조절합니다. 조종사가 페달을 밟지 않아도 기수가 돌아가는 것을 기계적으로 미리 방지(Collective-to-Yaw Mixing)하는 것이죠.
* 기계식 아날로그 컴퓨터: 이처럼 믹싱 유닛은 푸시-풀 로드와 벨 크랭크의 정교한 조합을 통해 조종사의 입력을 최적의 비율로 배분하는 물리적인 지능형 허브 역할을 수행합니다.
2. 정지에서 회전으로의 도약: 스워시플레이트(Swashplate)
믹싱 유닛을 거쳐 정제된 신호는 이제 기체 중앙 마스트에 위치한 스워시플레이트에 도달합니다. 이곳은 정지해 있는 기체의 움직임을 실제 고속 회전하는 날개로 전달하는 핵심 마디입니다.
* 고정판(Stationary Swashplate): 기체에 고정되어 믹싱 유닛으로부터 온 신호에 따라 위아래로 움직이거나 전후좌우로 기울어집니다.
* 회전판(Rotating Swashplate): 고정판 위에 얹혀 로터와 함께 회전합니다. 고정판의 기울기 정보를 그대로 유지한 채 회전하며 조종 신호를 날개에 전달합니다.
3. 최종 단계: 피치 로드와 날개의 변화
회전판에 연결된 피치 컨트롤 로드(Pitch Control Rod)는 실제 회전 중인 날개의 피치 혼(Pitch Horn)을 직접 밀거나 당깁니다.
* 콜렉티브 입력 시: 스워시플레이트 전체가 수직으로 오르내리며 모든 날개의 각도를 동시에 변화시켜 전체 양력을 조절합니다.
* 사이클릭 입력 시: 스워시플레이트가 특정 방향으로 기울어지며, 날개가 한 바퀴 회전하는 동안 위치에 따라 각도가 계속 변하게(Cyclic) 만들어 기체의 방향을 바꿉니다.
4. 페달조작과 테일 로터의 연결
믹싱 유닛에서 보정된 신호 중 일부는 기체 후방을 가로지르는 긴 샤프트나 로드를 통해 테일 로터 기어박스로 향합니다.
* 독립과 연동의 조화: 조종사의 페달 조작은 물론, 믹싱 유닛에서 넘어온 '자동 보정 값'이 합쳐져 꼬리 날개의 피치를 조절합니다. 이를 통해 조종사는 토크 변화에 따른 기수 흔들림 걱정을 덜고 임무에 더 집중할 수 있게 됩니다.
결론: 기계식 시스템이 주는 시사점
이 모든 과정은 단 1%의 전자적 도움 없이, 오직 금속 막대와 베어링의 물리적인 결합만으로 이루어집니다. 조종사가 기체의 미세한 떨림을 손끝으로 느끼고 즉각 대응할 수 있는 이유도 바로 이 직접적인 연결 덕분입니다.
하지만 UH-60이나 KUH-1처럼 고도로 설계된 기계식 믹싱 유닛조차 조종사의 피로도를 완전히 없앨 수는 없습니다. 기체 본연의 불안정성을 완벽히 다스리기 위해선 결국 '전자적 보조'가 필요하기 때문이죠. - 기계적인 믹싱은 항공기의 기준 무게를 중심으로 설정되기 때문에 항공기의 중량 변화에 대한 대응은 제한된다.
'헬리콥터 이론' 카테고리의 다른 글
| 032 - AFCS 4 - 무너진 신경망을 대신할 'Plan B', 이중화 구조(Redundancy) (0) | 2026.04.16 |
|---|---|
| 031 - AFCS 3 - 근육이 된 유압, 신경이 된 SEMA (0) | 2026.04.16 |
| 029 - AFCS 1 - 순수 기계식 조작 시스템(MFCS) (3) | 2026.04.16 |
| 028 - 엔진 - 헬리콥터 RPM 제어기술의 변화 (0) | 2026.04.14 |
| 027 - 고도4 - 밀도고도(Density Altitude) (0) | 2026.04.11 |